マルチボディビークルダイナミクス:定常ソルバを用いたシャシーの設計とシミュレーション解析
本ブログでは、Modelon Impact 上での車両シャシーのモデリングとシミュレーション検証に焦点を当て、Modelon Impact に備わっている定常ソルバと複数シミュレーションの自動実行機能を用いたマルチボディビークルダイナミクスの迅速且つ正確な定常シミュレーション実行の手法についてご紹介します。
このブログシリーズの第1弾「Modelon Impact 上で効果的なサスペンションモデルを設計」では、サスペンションシステムの設計と解析に焦点についてご紹介しています。
車両ダイナミクスライブラリを用いた車両シャシーのモデリングと設計

ここでは、車両及びサスペンションの詳細な特性を多項式を用いて表現したシンプルなモデルを利用します。このモデルによってシャシー挙動の全体像を把握することができ、その結果はサスペンション設計時の目標値となります。またそのサスペンション設計の際にも、元のモデルにおいてサスペンション部分をマルチボディコンポーネントで置き換えたもので再度解析が実行でき、目標値に対する検証を行うことができます。
準静的解析
最初のステップとして、車両の定常挙動の理解が必要です。車の速度と横加速度を変化させながら、2つの車軸にかかる力の配分や、ロールモーメント分布が及ぼす横方向の荷重移動への影響、そして車の基本的なハンドリング特性を解析することができます。
シャシーを上記のような所望の状態にするためには、準定常解析の適用が必要となりますが、弊社の車両ダイナミクスライブラリ(Vehicle Dynamics Library)ではそれを簡単に実施することができます。運転者モデルの代わりにロボットモデルを使用してシャシーに力とトルクを付与し、所望の状態を再現します。定常状態の再現によって他の外力を一切与える必要がなくなり、シャシーを所望の状態を維持するために必要な入力だけを求めることができます。そしてそれはModelon Impactを利用することで実施が可能です。
ハンドリング線図
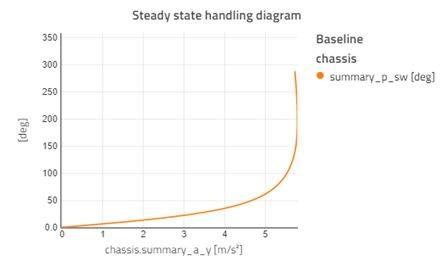
シャシーの定常状態での挙動評価として、ハンドリング線図を見てみましょう。ハンドリング線図は、指定された横加速度を維持するために必要なハンドル舵角を示したグラフで、これによりアンダーステア傾向の度合いと発生可能な最大横加速度を求めることができます。車両の横加速度を増加させた際にハンドルを更に切り込む必要がある場合、その車両はアンダーステア傾向があるといいます。この傾向はより安定的であるため、一般的に乗用車ではこの傾向を有することが望まれます。一方スポーツカーやレーシングカーの場合には、この傾向を小さくすることで安定性は犠牲になりますが応答性が高まります。
Modelon Impactにて適切なテンプレートモデルを選定し定常解析ソルバを選択することで、ハンドリング線図を得るための定常解析を実施することができます。この場合には車両速度や旋回半径を維持するためのロボットモデルは不要となり、サスペンションの剛性による動的な応答も無視されます。なぜなら定常状態での解を求めるためです。
図1は、サンプルとして使用したシャシーモデルにおける時速100kmでのハンドリング線図です。以降のハンドリング線図も、すべてこの速度での解析結果です。
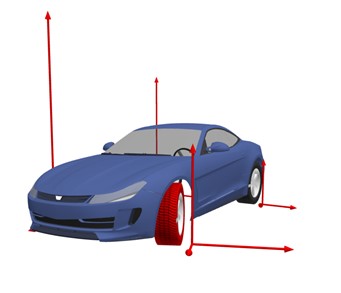
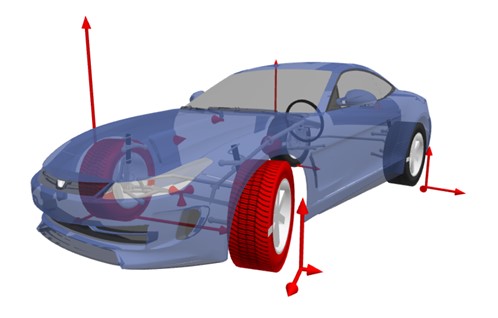
各結果出力点においては、上記の線図だけでなくシャシーモデル内の全ての変数の値をグラフ化して確認することが可能です。加えて最近リリースされたModelon Impatの可視化機能を利用することにより、図2に示すように任意の時刻での車両の様子をアニメーション表示することが可能です。
この結果をベースラインとし、続いていくつかのパラメータを変更してハンドリング線図に与える影響を確認してみましょう。まずは重心を前後方向に変化させ、どのような変化が生じるかを評価します。図3は、フロントアクスルに対する重心の前後方向位置を-1.0~1.5mの範囲で20段階にスイープさせたときの、ハンドリング線図の変化を示しています。実際にこの解析では20段階の各ケース毎に100個の定常点での計算を実行していますが、多項式モデルを使用した定常解析のため約15秒で全ての解析が完了するパフォーマンスを有します。
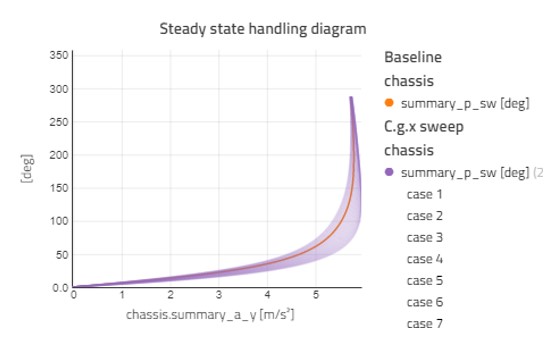
図3は、重心を前方に移動させると、安定性が増すものの、横方向のピーク加速度は低くなるという予想通りの結果を示しています。また、重心をより後方にすると、より高い横加速度のピーク値を有する応答性の高い車両になります。
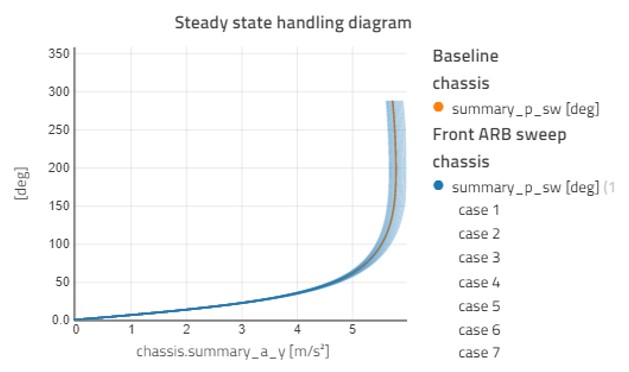
次に、アンチロールバー(スタビライザー)の剛性を見てみましょう。図4は、フロントアンチロールバーの剛性を150から300Nm/radまで15段階に変化させた際の結果を表しています。この部品は、ロールモーメントに対する横加速度の発生度合いに最も大きな影響を与えます。この部品の剛性が高くなる程フロントアクスルにおけるロールモーメントを抑え込み、横加速度のピークが下がるためステアリング時のグリップ力が低下します。
シャシーに必要な力やトルクを与える準定常解析用ロボットモデルでは、駆動力や制動力の各アクスルへの配分を設定することができます。これによってブレーキ力や駆動トルクの配分を変更した際の評価を行うことができます。図5は、-3m/s2の減速度においてフロントアクスルでのブレーキバイアスを50%から100%に変化させた際のハンドリング線図です。
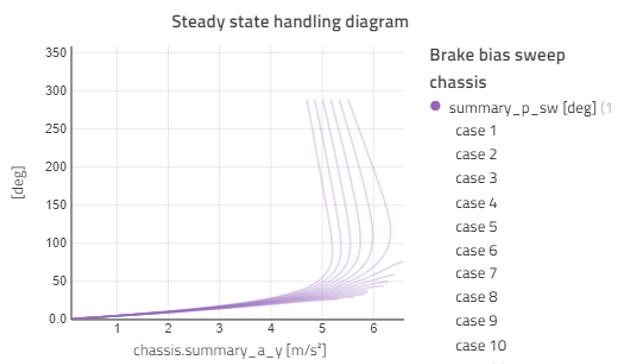
図5より、ハンドル舵角全体に渡って解が得られているものはフロントでの制動力が最も高い場合から6ケースしか存在していないことが分かります。これはフロントブレーキバイアスが82%以上であることに対応します。
最後に、サスペンションのキネマティックな特性が与える影響を見てみましょう。図6は、上記の結果よりフロントブレーキバイアスを82%に設定した状態で、フロントサスペンションのバンプステア比(トー角対タイヤ上下動)を-11.5~11.5°/mに変化させた際のハンドリング線図です。
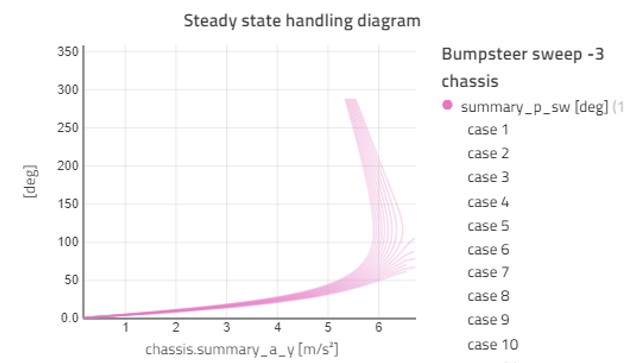
図6より、サスペンションのキネマティックな特性が車両の安定性に大きな影響を与えることが分かります。これを利用してサスペンションのキネマティック特性の目標値を定めることができ、それを達成するために各部品の配置(質量分布)やロールモーメント、駆動力や制動力の配分などを決めて行くことになります。
車両の動的応答
定常状態でのハンドリング特性に続いて、今度は車両の動的な応答を確認します。これには周波数領域での解析やステアリング操作のステップ入力に対する応答などが含まれます。
周波数応答の解析
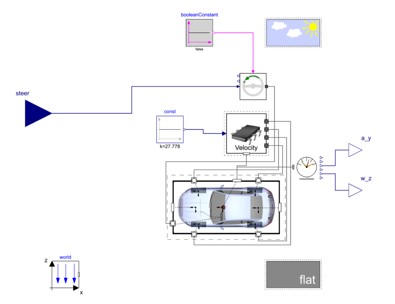
周波数応答解析により、ステアリングを異なる周波数で操作した際の車両の応答を求めることができます。この解析をModelon Impactで実施する際には、最初に車両を目的とする車速で走行している状態にした上でモデルをステアリング入力に関して線形化します。使用するモデルを図7に示します。
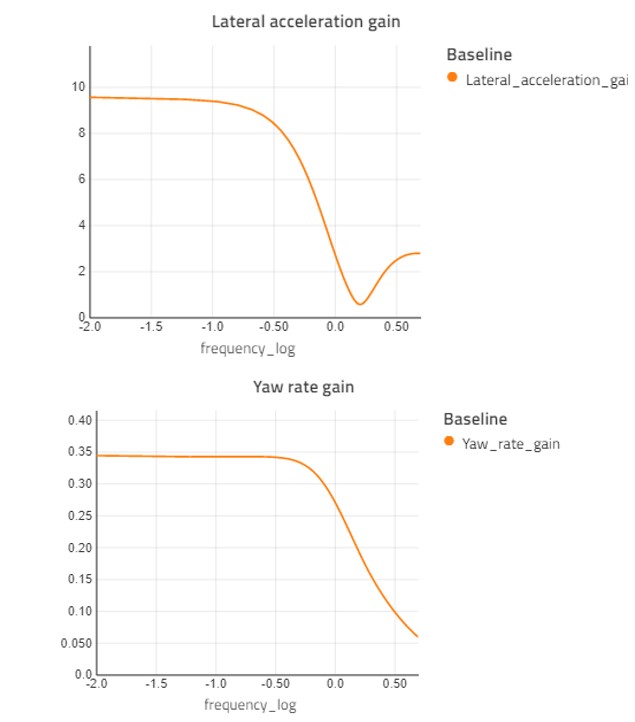
周波数応答解析の結果、特定の周波数でステアリングを操作した際の注目する出力の振幅(倍率)を知ることができます。図8には、その出力として横加速度及びヨーレートを選択した場合の結果を示します。
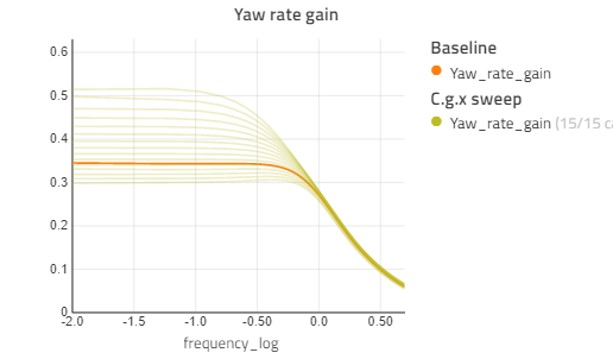
定常解析と同様に、パラメータスイープによって周波数応答の変化を確認することが可能です。図9は、前述の解析と同じく重心位置をスイープした場合の結果で、重心位置を前後方向に-1mから-1.5mまで変化させています。
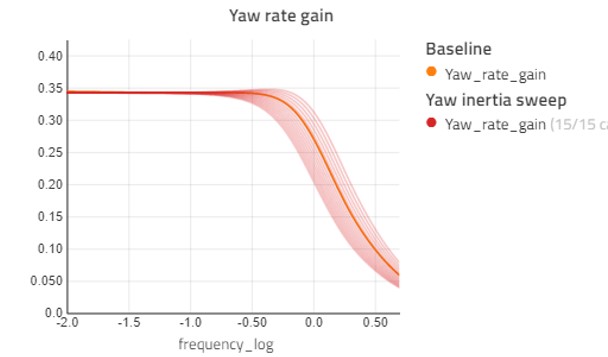
車両のヨー軸周りのイナーシャを変化させた場合の影響についても確認してみましょう。図9は、ヨー軸周りのイナーシャを1500kgm2から3000kgm2まで変化させたときのヨーレートゲインを示しています。グラフから分かるように低周波領域ではほとんど差異がないため、定常に近い状態のハンドリング線図にはほとんど影響がないことが分かります。一方、周波数が高い領域では、このイナーシャの違いが車両の応答に大きな影響を与えます。
ステップステア
車両の応答性を評価する簡単なテストの一つとして、ステップステアがあります。所望の車両速度においてステアリングホイールに短時間である角度を与え車両に生じる挙動を評価します。これにより車両の応答性を知ることができます。シミュレーションにおいては完全なステップ入力をステアリングに入力することも可能ですが、実車両ではステップではなくランプ状の入力を与えて評価することになります。
図11は、100km/hで走行中に0.5ラジアンのステップ入力をステアリングに入力した際の結果です。グラフから分かるように、ステップ入力に対して最初に横加速度に変化が生じます。続いて、サイドスリップが生じるに連れてヨーレートにも変化が生じています。最終的には定常解析におけるハンドリング線図での結果に収束すると共に、周波数応答線図における定常ゲインとも一致します。
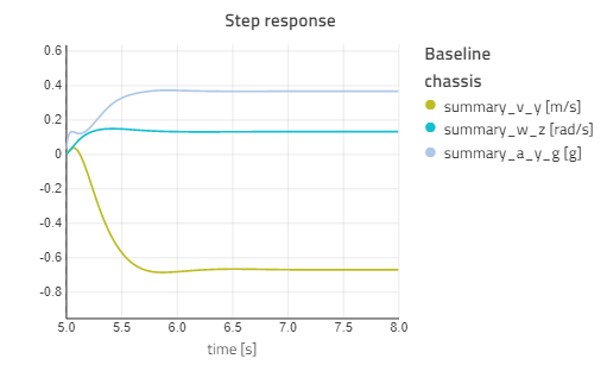
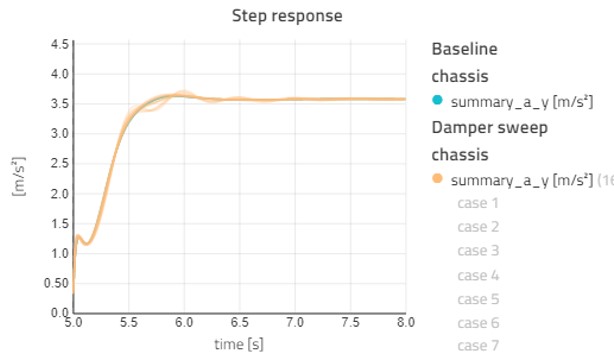
図12は、車両のダンパ設定を変更した場合の効果を表しています。この図は、フロント及びリアのダンパを1000~8000Ns/mの範囲で各4段階に変化させた場合の、ステップステアに対する横加速度応答を示しています。Modelon Impactで複数のパラメータを同時にスイープする場合にはすべての組み合わせが実行され、その結果16ケースでの応答が得られます。
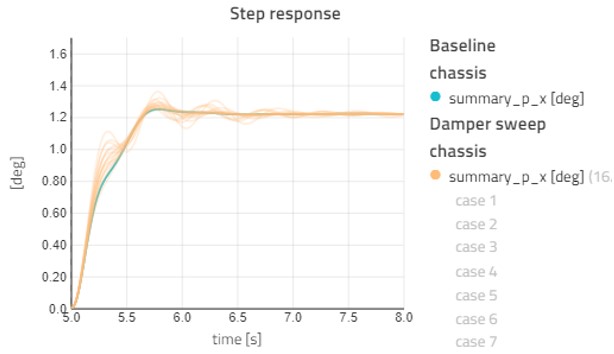
ダンパ値を変化させた場合の影響は、ロール角の応答に明確に表れます。図13は、上記と同じダンパ強度のスイープに対するロール角の応答を示したものです。
詳細検討フェーズでの、Modelon Impact及び車両ダイナミクスライブラリの活用
これまでにご紹介した解析では、サスペンション設計のための特性や目標把握においてシンプルなシャシーモデルを利用しました。それに続いて実際のサスペンション設計が開始された後は、今度はマルチボディライブラリを用いて構築したモデルに対しても同様の解析を実施することができ、目標とする性能を達成できたかを確認することが可能です。
Modelon Impact に組み込まれた弊社の車両ダイナミクスライブラリでは、必要な詳細度のシャシーモデルを同一のテンプレート上で切り替えて利用することが可能です。したがって最初は簡易なモデルを用いて全体的な特性や目標を決定し、その後は生産開始までの間でのより詳細なモデルでの設計案の改善を同一のシミュレーションを繰り返すことで継続することができます。
結論
弊社の車両ダイナミクスライブラリは、定常シミュレーションや複数シミュレーションの自動実行機能が可能なModelon Impactと組合わせることで、さらに強力なシミュレーションツールとしてご利用いただくことが可能です。ユーザの皆様が正しい解を短時間で得られることを目指して、弊社は使い易いツール群の提供を進めて行く所存です。弊社の車両ダイナミクスライブラリは、ここでご紹介したサスペンションやシャシーの設計からリアルタイムシミュレーションやDriver-in-the-Loopシミュレータまでの幅広い実利用領域をカバーしています。弊社による各種ソリューションの提供に是非ご期待ください。


