電気自動車におけるトルクベクタリングシステムの設計
本ブログ記事では、電気自動車におけるトルクベクタリングシステムの作成と解析の課題と解決策を取り上げます。Modelon Impactは、業界をリードする車両ダイナミクスライブラリおよび電動化ライブラリと連動しており、ユーザは、個々のコンポーネントやサブシステムをカスタマイズして解析する柔軟性を持ちながら、事前に作成されたテンプレートをシームレスにドラッグ&ドロップすることができます。
トルクベクタリングシステムの開発
トルクベクタリングとは?トルクベクタリング技術とは、各ホイールのトルクを変化させる自動車の能力のことです。トルクベクタリングシステムは、コーナリングに応じて特定のホイールまたはアクスル間でトルクを伝達することを可能にします。この技術コンセプトは、車両のダイナミクスを向上させつつ、ステアリング・レスポンスとハンドリングを改善するように設計されています。
内燃機関エンジンを搭載した車両では、トルクベクタリングは機械的なプロセスです。しかし、各車輪を独立に駆動する複数のモーターを備えた電気自動車では、ソフトウェアが各モーターの動作量を決定します。電気自動車用のトルクベクタリングシステムを開発する際には、個々のモーター、コンポーネント、サブシステムがすべて正しく連動していることを保証するという課題があります。さらに、電気自動車の開発サイクルの早い段階で、異なるサブシステム(機械、電気、制御システム)間の相互作用の影響を理解し、定量化することが極めて重要です。モデルは、これらの異なるコンポーネントを適切な忠実度で表現することができ、初期設計段階で電気自動車全体の性能目標に基づくサブシステム要件の特定を可能にします。
電気自動車のトルクベクタリングシステムのモデリング
電気自動車(EV)は、駆動車軸とモーター数について異なるパワートレインアーキテクチャーで構成することができます。1つの車軸に個別に制御される2つのモーターを搭載することで、車軸の両側でトルク差を適用することが可能になります。従来のトルクベクタリング・ディファレンシャルと比較して、電気モーターは、2つの車輪(または車軸)間の機械的な接続がないため、応答時間が速く、トルク伝達方向の柔軟性が高いという利点があり、最終的には、より安全で安定した車両を作るために使用することができます。
電気モーターの統合は、先進運転支援システム(ADAS)への関心を煽ります。ADASは、先進技術を使用してドライバーを支援し、多くのアクティブセーフティ機能を含む自動車の電子システムです。ここ数十年、ADASの実装には従来の制御アプローチが広く用いられてきましたが、電気自動車のADASシステムは、最適な駆動トルク配分に焦点を当てた各車輪モーターの制御による電気自動車の動的挙動と安定性の強化を提供します。
さらに、従来のサスペンション設計(KnC挙動)だけに頼るのではなく、連続的なヨー運動を提供するトルクベクタリングシステムを使用することで、電気自動車のハンドリング応答を大幅に改善することができます。トルクベクタリングシステムは、車両の定常状態だけでなく動的挙動を形成するためにも使用できます。例えば、アンダーステア傾向を低減し、車両応答の線形領域を拡大し、最大横加速度を増加させることで、このコンセプトはより優れた性能の達成に貢献することができます。
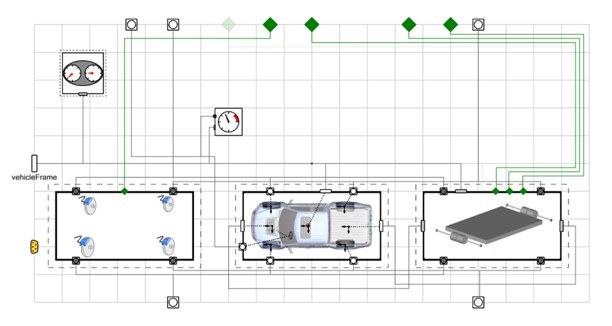
モデロンの車両ダイナミクスライブラリは、テンプレートベースのアーキテクチャに従っており、カスタムサブシステムを他のModelicaライブラリとドロップインで置き換えることができます。例えば、車両ダイナミクスライブラリは、モデロンの電動化ライブラリの詳細な電動パワートレインとシームレスに結合することができます。図1は、キネマティック・マルチボディ・シャシーとクワッドモーター全輪駆動パワートレインを搭載したのピックアップ車両を示しており、電動化ライブラリから利用可能なマシンとバッテリーのモデルを使用しています。
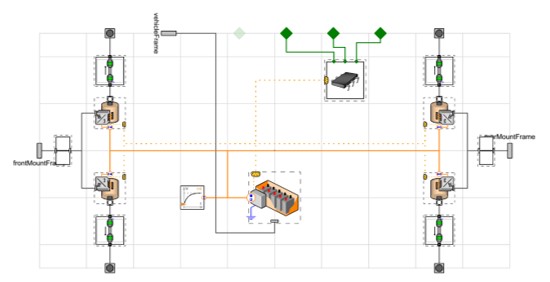
このアーキテクチャとModelicaベースのモデルの使用によるもう一つの利点は、車両ダイナミクスライブラリシミュレーションツールチェーンの残りの部分(実験、ドライバなど)との互換性を維持しながら、異なる忠実度を持つコンポーネントを使用できることです。図 2 に示すパワートレインの電気機械には、単純な効率ベースのモデルと電磁 AC 機械モデル(アクチュエーションダイナミクスの研究に有用)の両方をモデル化するオプションがあります。ドライブシャフトは、シャフトの弾性と慣性効果のモデリングを可能にするRotational3Dを使用してモデル化されています。マルチボディマウントにより、リジッドマウントまたはブッシュマウントを使用して、モーターからの反力トルクを車体に正確に伝達することができます。
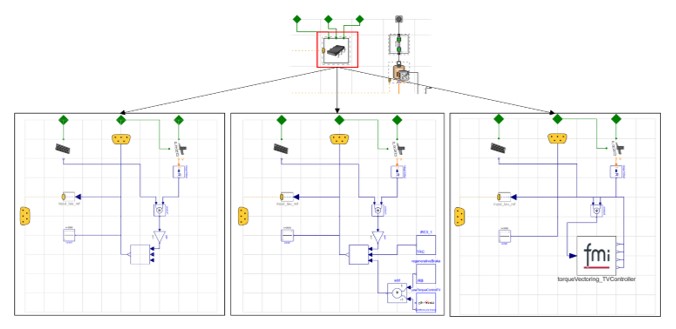
物理的サブシステムをモデル化するために利用できるモジュール性は、コントローラにも及びます。図3は、交換可能な3つのコントローラ例を示しています。左下のものはスロットルコマンドを4つのモーター間で均等にスケーリングし、中央のものはスリップ制御、回生ブレーキ、およびヨートルクを使用したトルクベクタリングを適用します。これら2つのコントローラの例は、Modelica Standard Libraryで利用可能な因果ブロックを使用して実装されており、Modelon Impact内でシンプルなコントローラを迅速に構築し、テストすることができます。Modelon ImpactのFMIサポートにより、FMUの実際の制御コードをインポートして、右下に示すようにコントローラを置き換えるために使用することができます。車両ダイナミクスライブラリで利用可能なパワートレインとコントローラのこれらのサンプルモデルは、ユーザが独自のパワートレインモデル、コントローラ、またはその両方に統合するための出発点として役立ちます。
このようなモジュラーアーキテクチャの柔軟性により、シミュレーションモデルに目的に応じた忠実度を使用することができます。航続距離推定のような使用例では、シャシーの縦方向のダイナミクスのみを把握する必要がありますが、パワートレインを詳細にモデル化するマルチボディモデルの代わりに、はるかに単純なシャシーモデルを使用することができます。トルクベクタリングの場合、車両の限界挙動を評価する際に、サスペンション運動学、コンプライアンス、タイヤの非線形性などの要因が(トルクベクタリングロジックとともに)車両全体の挙動に影響するため、マルチボディシャシーが用いられます。
ケーススタディ – 複数の電気自動車サブシステムを統合システムに融合
車両ダイナミクスライブラリと電動化ライブラリを組み合わせることの利点を強調するために、Modelon Impactでピックアップ車両を用いたクローズドループ操縦のシミュレーションを見てみましょう。図4のアニメーションは、車両が直進した後、58km/hの速度を保ちながら半径40mのカーブに進入する様子を示しています。
図4:タイヤ力を矢印で表したピックアップ車両のアニメーションビュー
コンポーネント要件の特定
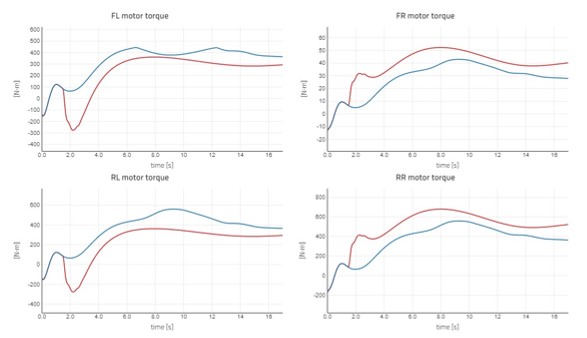
さまざまな物理現象を 1 つのシミュレーションモデルで記述することの利点は、設計サイクルの早い段階で車両全体の性能要件をサブシステムの目標値に変換できることです。トルクベクタリングを備えた電気自動車のハンドリング性能については、目標の動的挙動を満たすようにパワートレインのサイズを決定することが不可欠です。最初に評価できる要素は、モーターに必要な目標トルクとパワーです。上記の操縦について、図5はトルクベクタリングの有無によるピックアップ車両のモータートルクの比較を示しており、トルクベクタリングのないベースラインの場合と比較して、右側の外側のモーターが内側のモーターよりも高いトルクを出力しています。
車両の全体性能と熱力学
車両の全体設計がさらに進むにつれて、目標性能特性が満たされていることを評価するとともに、システムに存在する性能ボトルネックを特定する必要があります。ここでは、設計サイクルの初期段階と比較して、より詳細なサブシステムモデルを使用して、車両全体の性能に焦点を当てます。
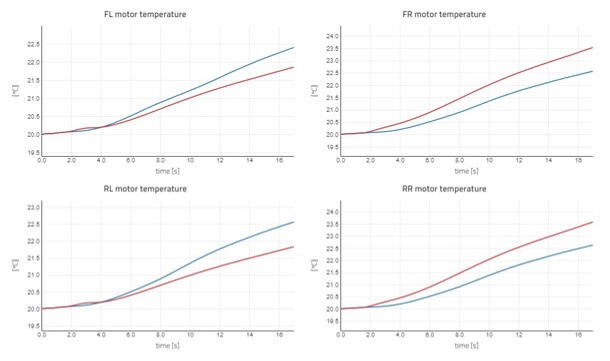
この例では、電動化ライブラリ のコンポーネント(バッテリーとモーター)には、効率マップと熱効果をさまざまな詳細度で追加できる柔軟性があります。モーターは最も単純な損失モデルを使用するように設定されており、効率は90%で一定です。これにより、非対称トルクの影響としての温度変化を調べることができます。図6に見られるように、トルクベクタリングがない場合と比較して、トルクが高い外側のモーターは温度の上昇を示し、内側のモーターは温度の低下を示しています。
トルク ベクタリング システムの場合、パワートレインの熱力学は、ドライバーの入力と制御アルゴリズムの両方からのトルク要求に依存します。さらに、パワートレインのコンポーネントには、理想的な動作とは別に最高温度に関して個別の制限があるため、制御システムを設計する際にはこれらの制限を考慮する必要があります。ここに示す例では、モーターの性能限界に関して、温度の関数としてさらに詳細な定義を追加できます。これは、車両性能に対するパワートレインの性能低下の影響、例えば、レーストラックで複数の周回を走行する場合のラップタイムの増加を定量化するために使用できます。
ハンドリング性能の評価
トルクベクタリングシステムは、EVのハンドリング性能を定義する上で不可欠な要素です。 モデロンの車両ダイナミクスライブラリで利用可能な解析機能と実験を使用すると、サスペンション、パワートレイン(アクチュエータのダイナミクスと限界を含む)、および制御システムの間の複雑な相互作用を研究することができます。
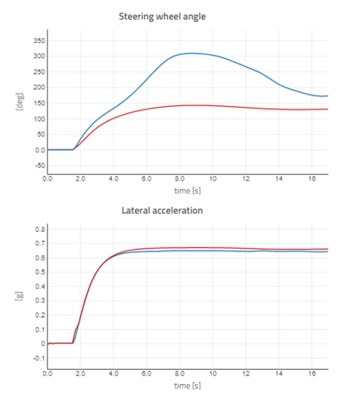
図7は、トルクベクタリングシステムがどのようにアンダーステアを低減するかについて、2つのケースのハンドル角と横加速度を比較したものです。トルクベクタリングを採用した車両(赤)は、より小さなステアリング入力でコーナーを通過することができ、アンダーステアが減少していることがわかります。
ドライバー・イン・ザ・ループ
車両とドライバーの相互作用は、物理的なプロトタイプが仮想的なプロトタイプに置き換わりつつある現在、シミュレーションモデルを使用してカバーする必要がある重要な事象です。電気自動車の場合、トルクベクタリングシステムがもたらす性能上の利点と、客観的および主観的なハンドリング目標とのバランスをとる必要があります。ビークルダイナミクスライブラリのモデルはリアルタイムに動作するため(エラストキネマティックモデルまたはより単純なサスペンションモデルの両方で)、開発サイクル全体を通してドライバーインザループシミュレーション(DIL)で使用し、完全な車両特性を検証することができます。2020.2リリース以降、モデロンの車両ダイナミクスライブラリモデルは、VI-Gradeのドライビングシミュレータのエコシステムと共に使用することができ、設計サイクルの早い段階でDILテストの一環としてシミュレーションで使用されるのと同じモデルを使用することができます。
結論
モデロンのフレキシブルな車両ダイナミクスライブラリアーキテクチャは、Modelon Impactの中でトルクベクタリングシステムをモデリングするために、シャシーモデルと電動化ライブラリのパワートレインコンポーネントおよびコントローラを組み合わせることを可能にします。スケーラブルな忠実度により、設計サイクルの早い段階でサブシステムの性能目標を導き出すことができる一方、車両設計が進むにつれて、完全な車両性能を検証し、性能限界を特定するための詳細なモデルを提供することができます。これらの機能により、Modelon Impactの車両ダイナミクスライブラリおよび電動化ライブラリモデルを使用して、電気自動車のトルクベクタリングシステムを設計および解析することができます。