車両ダイナミクスライブラリにおけるFTire モデルのサポート
In vehicle dynamics simulations, tires are one of the most crucial factors governing the behavior of a moving vehicle. The ability to integrate tire models into a vehicle dynamics model is essential for accurately representing vehicle behavior as well as tire performance.
Serving as the direct link between the vehicle chassis and the road, the vehicle’s tires must transmit vertical, longitudinal, and lateral forces to the chassis suspension. A tire model must accurately represent the physical tire in the vehicle dynamics simulation. Tire models are conceptually defined as a non-linear system with multiple inputs and multiple outputs as shown in Figure 1. Tire models must consider and accurately describe how changes in thread deflection, carcass/belt deflection, distribution of contact pressure, and tire-road friction relate to changes in force and moments.
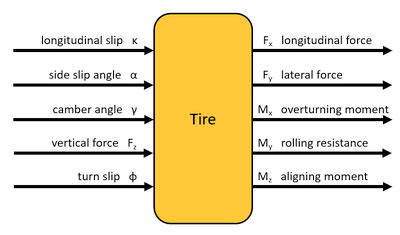
Figure 1: Tire model inputs and outputs
Tire behavior is very complex and not trivial to describe mathematically. Various modeling approaches have been developed to describe tire behavior so that they can be included in vehicle dynamics simulations. These approaches range from empirical to theoretical models, as in Figure 2. Empirical models are mathematical approximations used to represent the tire’s characteristics based solely on experimental data. Empirical models require extensive physical testing to measure tire behavior. Theoretical models are more complex and include the physical structure of the tire. Theoretical models do not require physical testing but typically require significant modeling and computational effort.
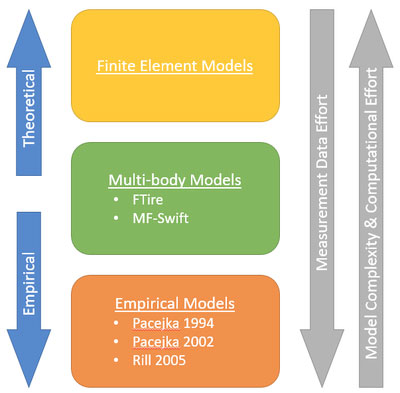
Figure 2: Tire model complexity
Modelon recognizes the value and impact of tire modeling on full vehicle simulation. As such, our Vehicle Dynamics Library (VDL) offers industry-standard empirical tire models (e.q. Pacejka 1994, Pacejka 2002, and Rill 2005) suitable for vehicle handling simulations. VDL offers an interface to the Delft MF-Tyre and MF-Swift models and directly supports integration of tire models compatible with the Standard Tyre Interface (STI). VDL is also extensible to allow users to integrate their own tire models.
In the upcoming fall release, VDL will include an interface to cosin’s FTire. FTire is designed for vehicle comfort simulations and prediction of road loads on road irregularities and can also be used as a structural dynamics-based, highly nonlinear and dynamic tire model for handling studies without limitations or modification to input parameters. FTire describes most of the complex tire phenomena on a mechanical, thermodynamical, and tribological basis, with very good correlation to measurements.
The VDL-FTire Interface will allow users to easily take full advantage of the FTire capabilities in their vehicle model to provide improved predictive capabilities for handling, ride/comfort, extremely rough roads, tire imperfections, temperature distribution, tread wear, and misuse. The interface is cross portable to all environments that support VDL. It is deployable on a wide range of hardware platforms and will be available at no incremental cost for VDL customers.
Simulation of a vehicle using the FTire tire model striking a plank to evaluate road loads on the vehicle chassis
FTire
FTire (Flexible Structure Tire Model), is a physics-based, 3D nonlinear tire simulation model, provided by cosin scientific software. FTire is designed for primary and secondary ride comfort simulations, handling, suspension control system simulation, NVH, prediction of road loads on road irregularities even with extremely short wave-lengths, and more. FTire also comes in real-time capable versions. For more info on FTire, click here.
About Vehicle Dynamics Library
Modelon’s Vehicle Dynamics Library is the industry standard for modeling, simulation, and analysis of road vehicles using Modelica. It features unrivaled deployment capabilities, multi-domain integration, and realtime support of high-fidelity models. It is available with a Modelon Impact Pro license. Learn more here.


