4輪自動車の車体姿勢拘束を考慮した予測運動制御 – IEEE CDC 2023受賞者

本ブログは、同済大学のIEEE CDC Autonomous Driving Benchmark Control Challenge Gold Award受賞者(Hongqing Chu氏、Zongxuan Li氏、Qiao Kang氏、Zhenghao Li氏、Bingzhao Gao氏、Hong Chen氏)により執筆されています。
この投稿は、モデル予測制御(MPC)の革新的な使用による、車両の動的システムのコントローラの開発について詳述したものです。提案されたコントローラは、第62回IEEE Conference on Decision and Control (CDC 2023) Benchmark Challenge for Autonomous Driving Controlのために開発され、数十チームによる熾烈な競争を勝ち抜き、金賞を受賞しました。
チームは、このベンチマークコンペティションにおけるアルゴリズム検証のために、正確でユーザーフレンドリーなプラントモデルを提供してくれたModelonに心から感謝しています。Modelon ImpactとMathworksのSimulinkプラットフォームを組み合わせることで、現在のワークフローを中断することなく、制御シミュレーションの最新開発を活用し、システムのモデル化プロセスを簡素化することが容易になります。先進的なシミュレーションツールで有名なModelonは、さまざまな業界で複雑なシステムの設計、解析、最適化のためのソリューションを提供しています。同社の製品は、エンジニアが物理システムの高精度モデルを作成することを可能にし、様々なエンジニアリングソフトウェアとのシームレスな統合を可能にします。
MPCは、数学的モデルを使用してシステムの将来の挙動を予測し、最適化するプロアクティブな制御戦略です。MPCの有効性は、シミュレーションモデルの精度に大きく依存します。正確なモデルは、MPCが将来の状態を正確に予測し、最適な制御を可能にすることを保証します。Modelonの高度なシミュレーション機能の統合は、MPCの性能を高める上で極めて重要な役割を果たします。Modelonは、様々なシステムの複雑なダイナミクスをモデル化できるように、高忠実度の物理ベースのモデルを提供し、コントローラ設計とテストのための信頼できる基盤を提供します。
ベンチマークの問題の概要
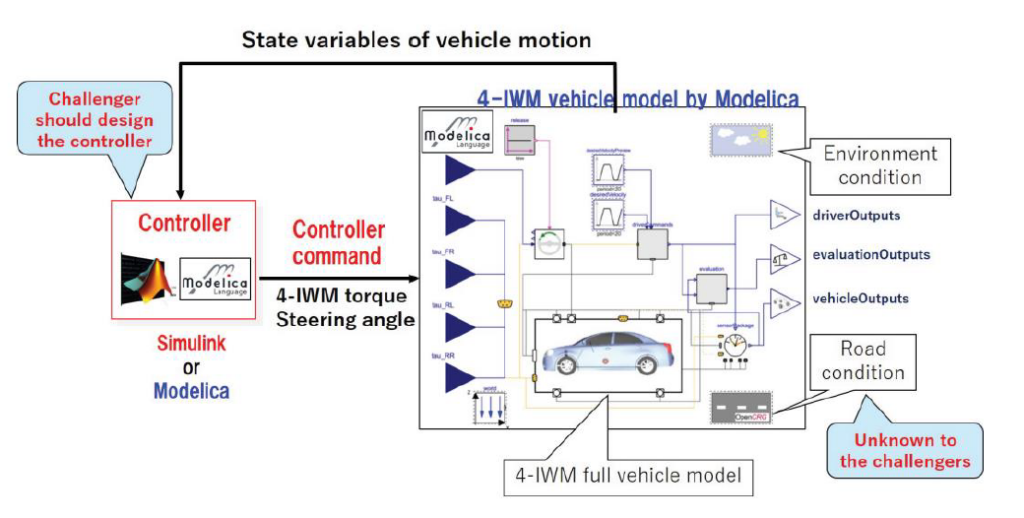
図1. ベンチマークの問題の枠組み
ベンチマーク問題は、4輪IWM(In Wheel Motor)車両の車両ダイナミクスを制御することであり、走行/制動挙動と車体姿勢を制御することができます。4輪IWM車両の完全な車両モデルは、サスペンションと車体の3次元マルチボディメカニカルモデル、バッテリーとモーターの電気モデル、非線形タイヤモデルを含むModelicaモデルとして提供されます。挑戦者は、4-IWMのトルクと操舵角のコントローラを設計し、テストすることが要求されます。このベンチマーク問題には2つの課題があります。
問題1(滑りやすく荒れた直線道路での加速と制動):
所望の速度プロファイルからの偏差、車体の動き(ヒーブ、ピッチ、ロール)、エネルギー消費を最小化する。
問題2(悪路でのISOダブルレーンチェンジ):
所望のコースからの逸脱、車体運動(ヒーブ、ピッチ、ロール)、エネルギー消費を最小化する。
車両ダイナミクスモデルはModelicaモデルとして提供されます。車両モデルは、3次元マルチボディメカニカルシステムモデルを含むシャシーモデルと、電気モデルによるIWMドライブトレインのパワーシステムモデルから構成されます。シャシーモデルは、3次元マルチボディメカニカルシステムを含み、フロントとリアのサスペンションキネマティクス、ボディモーション、非線形タイヤ特性を特徴としています。パワーシステムモデルは、バッテリシステム、4つのインホイールモータモデル、およびモデロンの電動化ライブラリを使用して構築されたコントローラで構成されています。このモデルは、サスペンションブッシュ、ステアリングシャフトの剛性、摩擦の非線形特性を考慮しており、これらは正確なステアリング挙動に不可欠です。モデルの階層構造により、Modelon Impactは連立微分代数方程式を解き、シミュレーションコードを自動的に生成することができます。また、各物理変数のシミュレーション結果の計算とプロットも可能です。Modelicaツールは、モデルの動的挙動を示すアニメーション結果の作成も容易にします。
制御スキーム
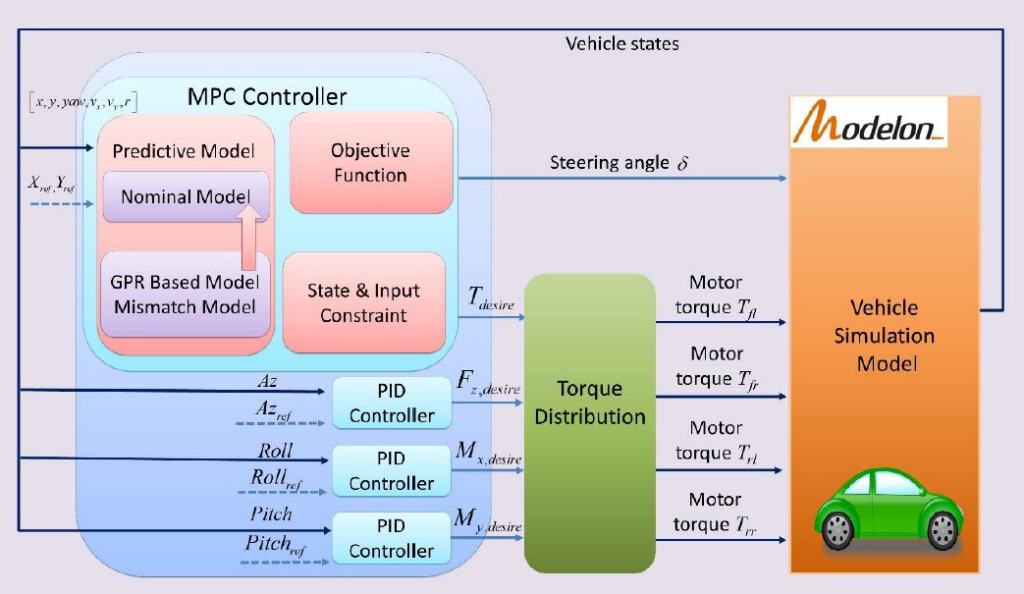
図2. 提案コントローラの制御方式
本ベンチマークコンペティションのために提案した制御方式を図2にまとめます。まず、PID制御器を用いてランダムな路面外乱から生じる付加的な上下力、ピッチ、ロールモーメントを計算します。次に、3自由度車両モデルとガウス過程回帰(GPR)を採用し、学習ベースの予測モデルを用いて、所望の速度と軌道に追従するMPCコントローラを開発します。最後に、所望の力とモーメントを、トルク分配を通して各駆動輪のトルクに変換します。
MPCコントローラ設計
モデル予測制御(Model Predictive Control:MPC)とは、有限の将来ホライズン(時間軸)上で制約のある力学系に対して、計算された制御動作がコスト関数を最小化する最適制御手法です。図3に示すように、MPCは予測モデルを利用して車両の将来の挙動を予測し、それに応じて最適な制御動作を計算します。これは、車両のダイナミクスが複雑で、環境が不確実な場合に特に有効です。
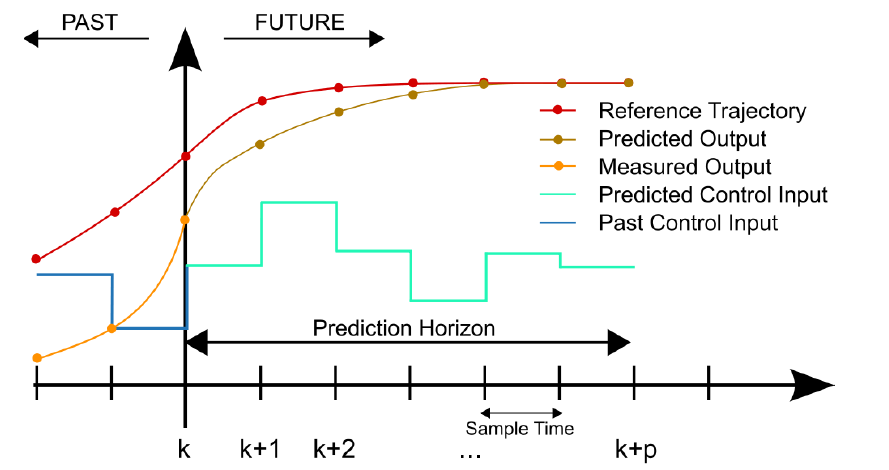
図3.MPCのスキーム
最適化問題は次のように定式化できます。制御目的は、所望の速度と軌道のトラッキングエラーを最小化することです。目的関数は、トラッキング誤差の2ノルムペナルティと制御入力から構成されます。
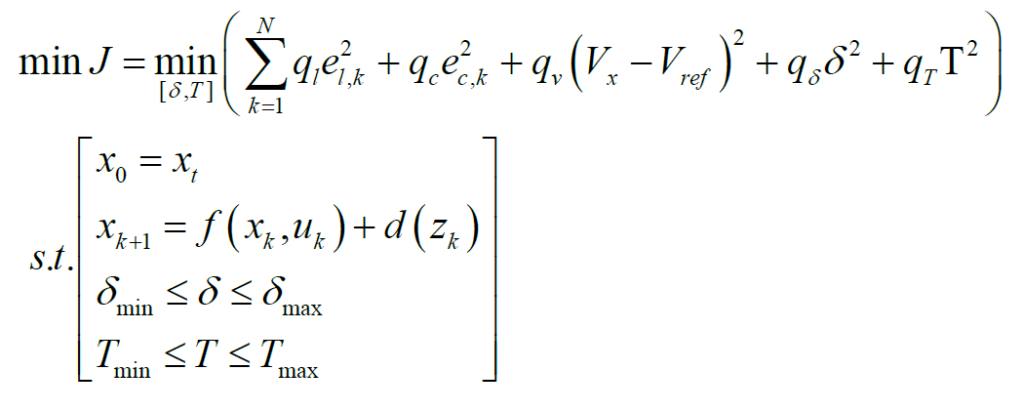
where
4輪IWD車両のモデリングには、3自由度の非線形車両モデルを使います。MPCコントローラの性能を確保するために、GPRに基づくモデル不一致推定モデルd( Zk )を開発し、予測された車両状態の誤差を補正するために使用します。したがって、モデルミスマッチ学習を用いた予測モデルは次式で表すことができます。

この最適化問題を繰り返し解くことで、所望の操舵角とヨーモーメントが得られます。所望のヨーモーメントが得られれば、各インホイールモータの所望の駆動力/制動力は、以下のトルク分配行列を用いて計算することができます。
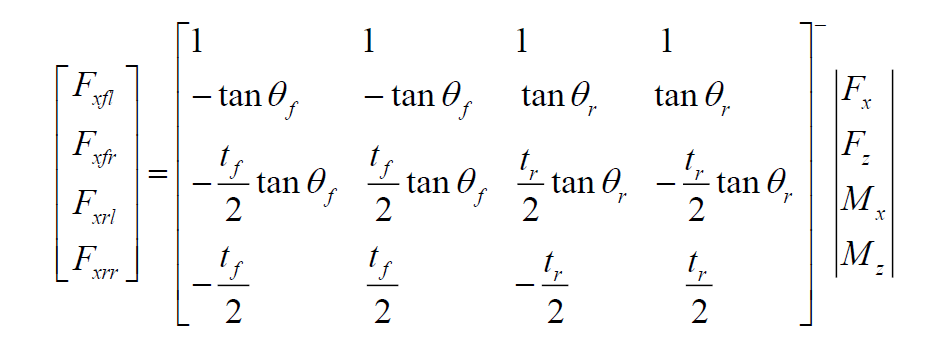
トルク分配マトリックスは、車輪の縦方向と垂直方向の力の関係によって導き出され、図4に示されています。
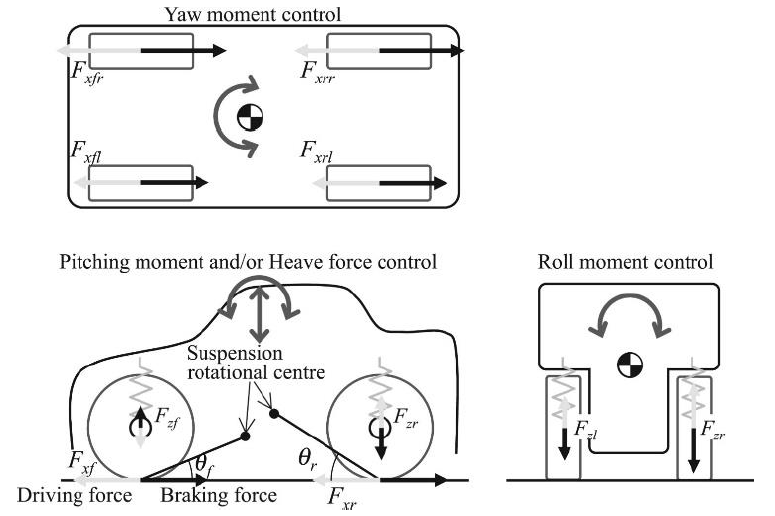
図4. 車輪の縦力と垂直力の関係
シミュレーション結果
今回、提案した学習MPCコントローラの性能は、Modelon Impactを用いた徹底的なシミュレーションによって示されました。以下の図は、各タスクに関するコントローラの性能と状態制約情報を示しています。LMPC(学習モデルによるMPC)アプローチを検証するために、従来のMPCとベースラインコントローラを比較対象として選択しました。
Task1
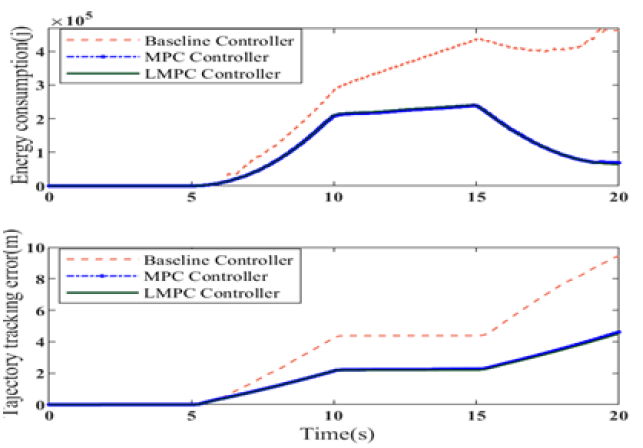
図5. コントローラーの性能
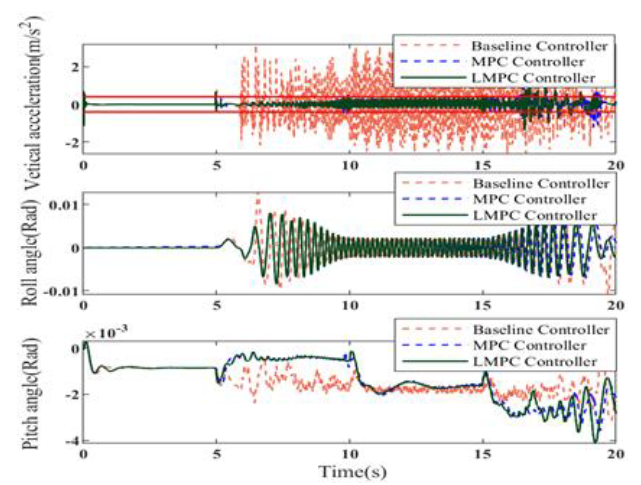
図6.車両状態制約
Task2
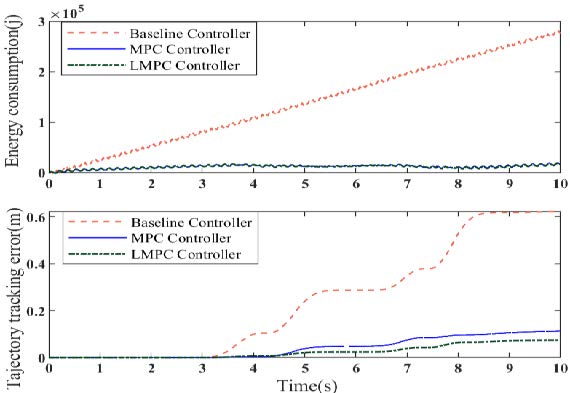
図7. コントローラーパフォーマンス
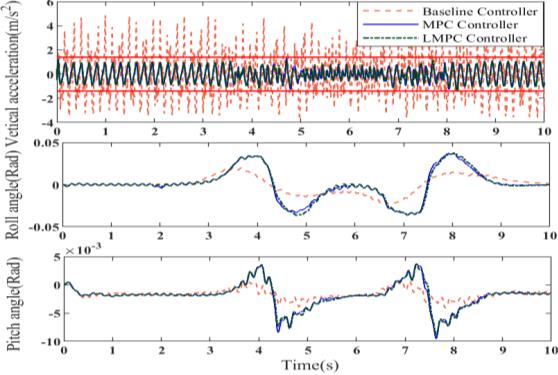
図6.車両状態制約
図5と図6は、タスク1に対するコントローラの性能と状態制約を示しています。MPCコントローラとLMPCコントローラはともに効果的であるが、LMPCの方が優れた性能を示し、エネルギー消費量とトラッキング誤差を最小化しています。速度追従の累積誤差は4.5059、エネルギー消費は6.4139x104Jと、従来のMPCコントローラに比べて約7%少なく、状態制約の違反も最小限です。図7と図8は、タスク2に対するコントローラの性能と状態制約を示しています。タスク2においても、結果は同様であり、軌道追跡の累積誤差は0.0743であり、MPCコントローラに比べて大幅に削減され、エネルギー消費は1.5482x104Jであり、MPCに比べて約10%削減されています。タスク2では、提案方式は垂直加速度、ロール角、ピッチ角を指定された範囲内に維持することに成功し、その有効性が確認されました。
まとめ
本ブログでは、学習型モデル予測制御(MPC)と車体姿勢制御のフレームワークを採用した革新的な制御方式を紹介します。提案する制御スキームの有効性を検証するために、SimulinkとModelon Impactのコ・シミュレーションテストを実施しました。ベースラインの結果と比較すると、速度と軌道の追従誤差が大幅に減少していることが確認できます。Modelon ImpactとSimulinkの組み合わせは、性能の向上だけでなく、シミュレーションの高速化も実現します。コントローラの開発に学習MPCを採用することで、様々な革新的な設計を迅速に検討し、コントローラの性能を向上させることができます。Modelonは、将来のプロジェクトのためにこの技術を継続的に強化・拡張し、システム設計と制御の分野をさらに発展させることを約束します。
同済大学チームについて
Zongxuan Li 氏は2023年、吉林大学(中国・長春市)で理学士号を取得。現在、同済大学上海知能自律システム研究所にて修士号取得を目指しています。主な研究テーマは学習モデル予測制御。
Qiao Kang 氏は2023年、吉林大学(中国・長春市)で理学士号を取得。現在、同済大学上海知能自律システム研究所にて修士号取得に向け研究中。主な研究テーマは運動計画と車両制御。
Zhenghao Li 氏は2021年、同済大学(中国・上海)にて自動車工学学士号を取得し、現在同大学で修士号取得に向け研究中。主な研究テーマは自律走行車のプランニングと制御。
Bingzhao Gao 氏(IEEEのメンバー)は、1998年に吉林大学(中国・長春市)で車両工学の学士号、2002年に修士号を、2009年に横浜国立大学(日本・横浜市)で機械工学の博士号、吉林大学(中国・吉林市)で制御工学の博士号を取得。2013年より吉林大学教授。現在は同済大学教授。研究テーマは車両パワートレイン制御と車両安定性制御。
Hong Chen氏(IEEEフェロー)は、1983年に浙江大学(中国・杭州)でプロセス制御の学士号を、1986年に修士号を取得し、1997年にシュトゥットガルト大学(ドイツ・シュトゥットガルト)でシステムダイナミクスと制御工学の博士号を取得。1986年、中国・長春の吉林工業大学に勤務。1993年から1997年まで、シュトゥットガルト大学システム力学・制御工学研究所(Institut fuer Systemdynamik und Regelungstechnik)の研究員。1999年よりTang Aoqing教授の後を継いで吉林大学長春校教授。2015年から2019年まで吉林大学自動車シミュレーション制御国家重点実験室主任。現在は同済大学(中国・上海)に特別教授として着任。研究テーマは、モデル予測制御、非線形制御、自動車システムを中心としたメカトロニクスシステムにおける応用。


