ハイブリッドモデリングと低次元化モデルおよびニューラルネットワークアプリ
物理モデリングは、予測能力と基本的な物理法則に基づくシステム挙動の深い理解を提供します。しかし、場合によっては、より低い計算コストやより高速な処理の実現が望ましいこともあります。このようなユースケースでは、ハイブリッドモデリングが役立ちます。ハイブリッドモデリングとは、物理ベースのコンポーネントやデータ駆動型技術など、異なる特性を持つモデルを組み合わせる手法です。 低次元化モデリングは、このアプローチにおいて重要な役割を果たします。複雑なモデルを簡略化しながら精度を維持し、より高速なシミュレーションとリアルタイムの最適化を可能にします。
よりスマートな車両のための適切なハイブリッドモデル(PHyMoS)プロジェクトの紹介
幸運にも過去3年間、モデロンはドイツ政府出資の研究プロジェクトに携わることができました。このプロジェクトはPHyMoSと呼ばれ、Proper Hybrid Models for Smarter Vehicles(よりスマートな車両のための適切なハイブリッドモデル)の略です。このプロジェクトでは、他の業界および研究パートナーと協力しました。
私たちは、人工知能を使用してデータ駆動型のモデルを作成する方法を検討し、いくつかの異なるユースケースに焦点を当てました。物理ベースのモデリングにより、これらのモデルのデータが提供されました。このプロジェクトは、正確性と手作業の労力との最適なバランスを見出すことを目的としていました。

プロジェクトの成果の一部として、モデロンは選択した(サブ)システムと主要変数に基づく低次元化モデルのModelicaモデルを生成するために、Modelon Impactの一部自動化されたワークフローを実演しました。次のセクションでは、自動車用燃料電池システムモデルの例を用いて、このステップを順を追って説明します。
Modelon Impactにおける低次元化モデリングのワークフロー
低次元化モデリングは、定義された動作範囲内での精度を損なうことなく、より高速なシミュレーションを可能にします。これは、PHyMoSプロジェクトにとって非常に重要なことです。
複雑なモデルを単純化することで、低次元化モデリングはエンジニアによる迅速な設計の反復、感度分析、リアルタイムの最適化を可能にします。これは、予測の信頼性を維持しながら計算負荷を合理化できるため、データ駆動型の技術を統合する際に特に有益です。
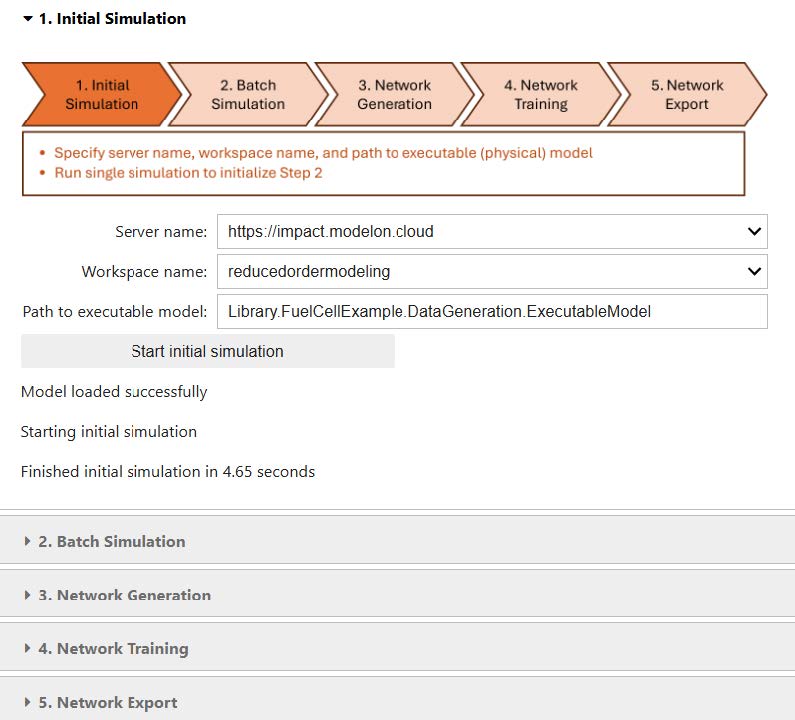
当社のワークフローは、主にニューラルネットワークを活用したデータ主導のアプローチでモデルを簡素化する低次元化モデリング技術と見なされています。これをサポートするために、当社はJupyter NotebookとしてPythonで記述したカスタムアプリを開発し、Voilaを通じてレンダリングすることで、直感的なウィジェットを備えた使いやすいユーザーフレンドリーなインターフェースを提供しています。
「簡略化する」コンポーネントの選択
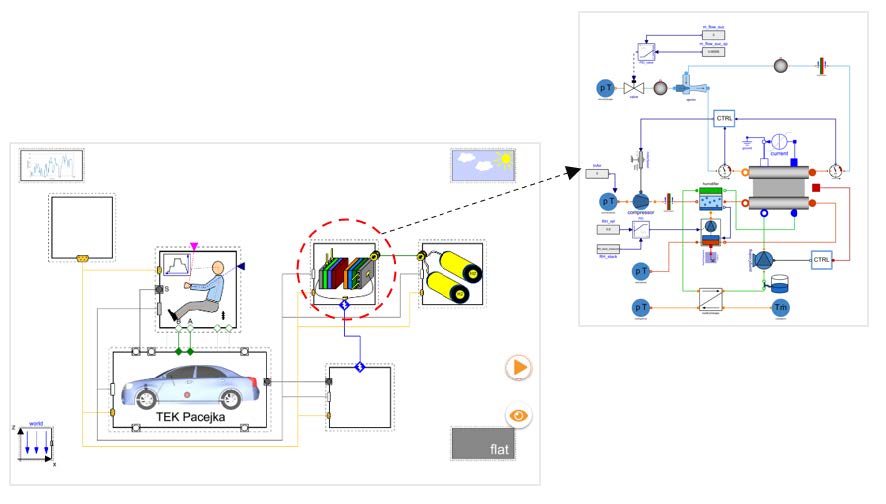
まず、使用するサブシステム/コンポーネントを選択します。低次元化モデルの技術では、シミュレーション時間を短縮しながら、サブシステム/コンポーネントの動作をあらかじめ決定された動作範囲内に保持します。下の例では、電気自動車の運転サイクルのシステムモデルがあり、このケースでは燃料電池モジュールを簡略化したいとします。電力負荷、周囲圧力、温度が水素消費にどのように影響するかに興味があると仮定し、したがって、幾何学、熱伝導などの複雑性を排除します。
ニューラルネットワークのトレーニング用データ生成
燃料電池モジュールの主要な入出力が特定された後、選択された主要変数を公開し、バッチシミュレーションによってこの物理モデルからデータを生成するためのテストベンチを用意するために、その周りに手動ラッパーを作成します。このデータは、その後ニューラルネットワークモデルのトレーニングに使用されます。
ニューラルネットワークの適切なトレーニングには、膨大なシミュレーションデータが必要です。この開発プロセスでシミュレーションデータを活用し、手動メッシングやソルバーの実行時間の長さといったボトルネックを排除することで、高品質なデータの流れを提供することができます。このアプローチにより、ニューラルネットワークのトレーニングを加速し、ハイブリッドモデリングアプローチの潜在能力を最大限に引き出すことができます。
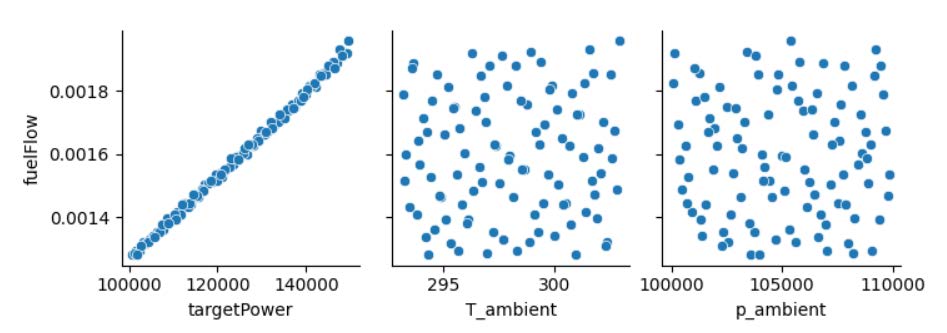
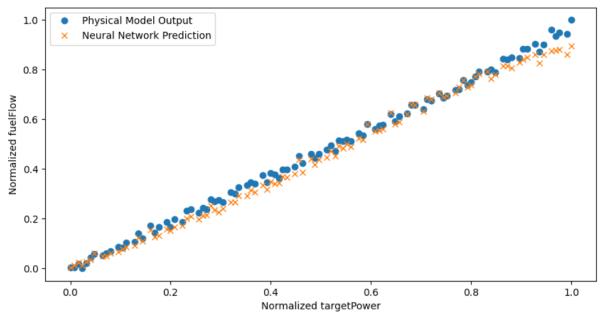
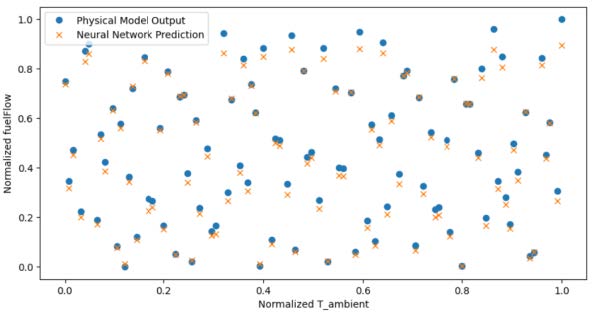
下の図は、与えられた範囲内で入力を掃引しながら100回のシミュレーションを行った結果を示しています。
Target power: 100kW to 150kW
Ambient temperature: 293K to 303K
Ambient pressure: 1 bar to 1.1 bar
ニューラルネットワークモデル
ニューラルネットワークモデルの作成には2つのステップがあります。
まず、カスタムアプリではTensorFlow/Kerasパッケージを使用して、フィードフォワードニューラルネットワーク(FFNN)構造を作成します。ユーザーは、層数、各層におけるニューロン数、使用する活性化関数を調整することができます。構造が準備できたら、アプリは以前の物理データを使用してネットワークを訓練し、モデルの動作を決定する重みおよびバイアスを生成します。以下の図は、物理モデルの出力に対するニューラルネットワークの予測を示しています(表示されている値は正規化された値であることに注意してください)。
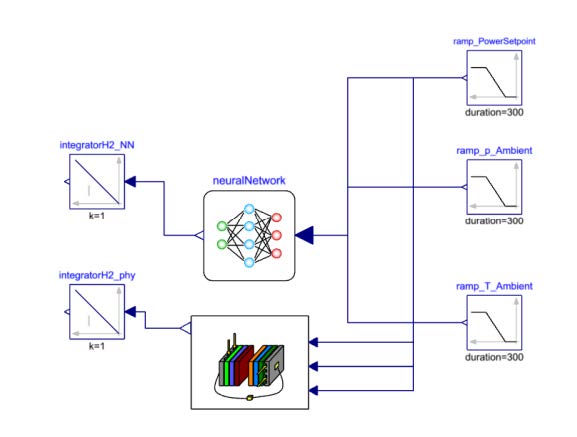
次に、生成された重みとバイアス値を転送し、オープンソースのNeuralNetworkライブラリからコンポーネントを使用してModelicaベースのモデルにパッケージ化します。以下の図は、ニューラルネットワーク燃料電池モデルがオリジナルのモジュールに対してどのように検証されたかを示しています。T=1000sの期間にわたって同じ電力設定値と周囲条件の変動が与えられた場合、水素消費量が推定されます。
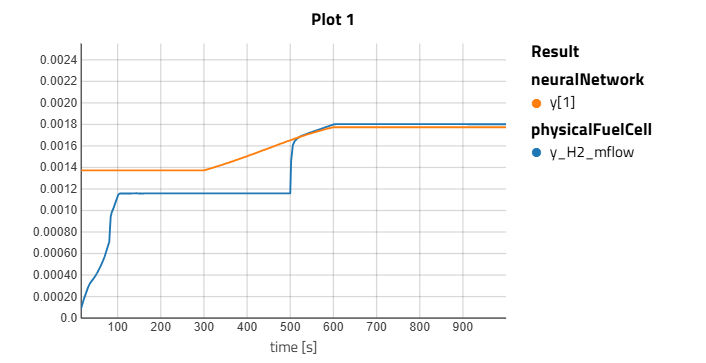
上記のシンプルなテストベンチでは、シミュレーション時間が29.18秒から0.047秒へと大幅に短縮されました。プロットされた主な出力である水素質量流量は、同様の値を示しています。初期化段階と、設定電力の変更による燃料電池の動的応答に起因する若干の相違が見られます。
ニューラルネットワーク手法のさらなる応用
プロジェクト中、熱交換器などの他の部分にもこの統合ワークフローを使用しました。全体として、許容可能な精度を維持しながら、パフォーマンスを29.13秒改善することができました。
このテストベンチでは、シミュレーション時間が99.8%削減され、29.18秒からわずか0.047秒になりました。
カスタムアプリのニューラルネットワーク手法は、より大きな開発可能性を提供します。 動的挙動をより正確に捉えるために、他のアルゴリズムやフレームワークを検討することも可能です。例えば、物理法則を学習プロセスに組み込むことを可能にする物理情報ニューラルネットワーク(PINN)などです。 研究者たちは、低次元化モデリングプロセスを完全に自動化する将来の取り組みも検討しています。
Thank you to our partners in Innovation
本プロジェクトにご協力いただいた皆様に感謝致します。
– ESI Germany
– LTX Simulation
– The Robert Bosch Group
– TLK-Thermo
– XRG Simulation
– University of Augsburg
– Technical University of Braunschweig
– Bielefeld University of Applied Sciences and Arts
彼らの貢献は、持続可能なモビリティのための物理ベースのモデリングとシミュレーションを推進します。このプロジェクトは、この分野における画期的な研究と技術的進歩を推進する上で重要な役割を果たします。
Related publication:
Hübel, Moritz, Nirmala Nirmala, Michael Deligant, and Lixiang Li, 2022. “Hybrid physical-AI based system modeling and simulation approach demonstrated on an automotive fuel cell.”, Asian Modelica Conference, pp. 157-163. 2022. https://doi.org/10.3384/ecp193157