電気自動車の動的シミュレーション:Modelicaによるピックアップ系EV車両のモデル化
電気自動車のダイナミクス (electric vehicle dynamics) に関する検討は、多目的最適化問題を解く必要が生じ、難しい課題となる場合があります。車両システムは世代を追う毎に複雑になり、コンポーネントが他のコンポーネントに及ぼす影響が大きくなってきています。例えば、パワートレイン部門は自己の部門内で担当のコンポーネントだけを作業することでは済まされません。関連部署と連携し、設計変更が及ぼす影響を車両レベルで確認することが要求されます。さもないとシステムやコンポーネント間で矛盾が生じてしまい、土壇場での修正や変更が必要となって莫大な労力を要するためです。
このための策として、すべての部門で「同一の信頼できるデータ (single source of truth)」を共有し利用することが挙げられます。しかしこれは、現実的には非常に困難です。多くの場合、部門毎に異なるツールやフレームワークを使用しており、多様な検証を実施するためにそれらを組合わせて車両全体モデルを構築することは、骨の折れる作業になるからです。このような異なるツールとモデルから車両全体モデルが構築できる状態を維持するには非常に多くの労力が必要となってしまい、その工数に見合った利益は得られません。
そのような場合に、 Modelica の利用で効果が生まれます。 Modelica はオープンで且つコラボレーションにも向いており、複雑なモデルを分担して構築することが可能なマルチボディ・マルチドメインのモデリングフレームワークです。 Modelica を FMI (Functional Mock-up Interface) と組合わせて利用することにより、 OEM を含めた幅広い範囲で唯一のデータを共有して利用するために必要な労力を大幅に削減することができます。この特長は、他のツールをいくつも同時に運用する場合と大きく異なる点であると言えます。
Modelica は物理モデリング言語のため、様々なドメインや 3D マルチボディモデルを組み合わせることで、一つのフレームワーク内ですべての属性をモデル化できます。唯一のデータソースが整っていることで、それぞれのチームが他部署と連携しないまま作業を進めるということがなくなるでしょう。
モデロンのライブラリを用いた 電気自動車のダイナミクス の検討
私たちは、 電気自動車 への期待が高まっているのを目の当たりにし、それに応じて性能や操縦性、快適さや他の項目に関しても高い期待が寄せられていると感じています。しかし、それらは複雑なマルチドメインシステムであるため、他部署と連携をせずに目標に向けて変更を加えていくと、他の車両特性に予期せぬ影響を及ぼすことがよくあります。車両全体をカバーするシステムレベルのモデルがない場合、これらの予期せぬ影響に気づかないまま開発が進む可能性があり、発覚したときには、すでに車両開発プロセスの後半にさしかかり、受け入れがたいトレードオフや費用のかかる変更が避けられません。もし、 Modelica ベースのフルビークルモデルで共同作業をするならば、どの部署でもレーダーチャートによる各種の指標の可視化やパラメータの変更、また他の車両特性への影響をすばやく確認することもできます。達成不可能な目標を早期に発見することができ、進展の見通しがない解決策に多くの時間が費やされる前に代替案を模索できます。
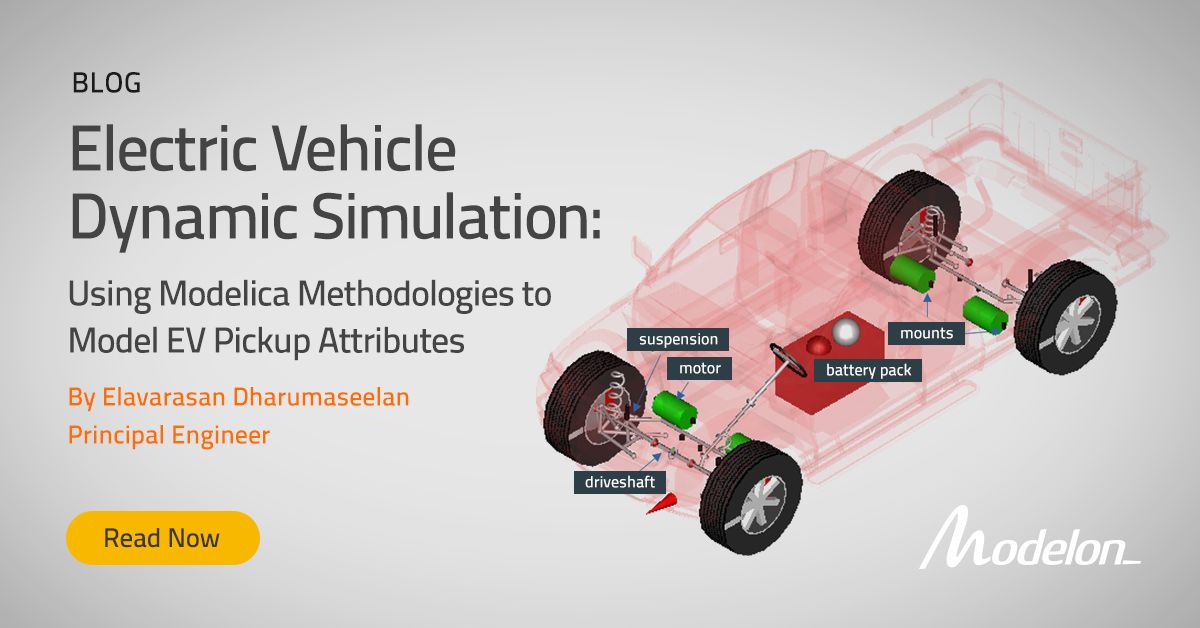
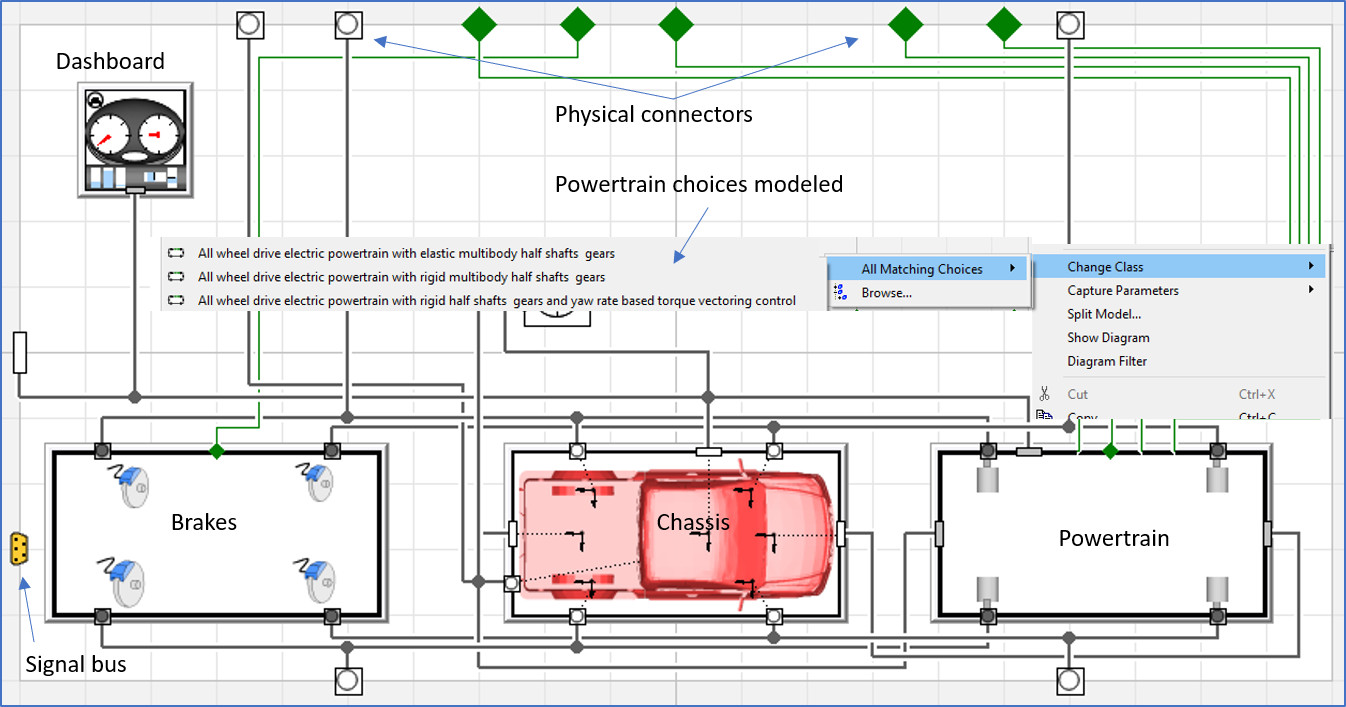
私達のコンセプトを実証するために、市販の EV ピックアップトラック (Rivian R1T) の公開データを取得し、 Modelica ベースの車両モデルを構築しました。このモデルは、今後のコンポーネント及び制御系の開発においても利用する予定です。また構築においては、モデロン製の車両ダイナミクスライブラリ (Vehicle Dynamics Library)、電動化ライブラリ (Electrification Library)、液体冷却ライブラリ (Liquid Cooling Library) を使用しています。このモデルでは、車両のバッテリ、走行用モータ、駆動系やシャシー(サスペンション、ブレーキ、ホイール、マウント)といった詳細なシステムが含まれます。そしてそれらを組み合わせることにより、車両全体を表す単一で統合化されたシステムを構築しました。
モデルの妥当性を確認するために、シミュレーションを実行し、得られた結果がメーカーが公表している仕様に沿っていることが確認できました。たとえば、モデルの走行距離はメーカーが公言している走行距離と一致していることがわかりました(おそらく実車の性能はプロトタイプ車に基づくものと考えられます)。
さらに重要な点として、このModelicaベースのモデルは、コラボレーションの促進やコスト削減の観点から一部の要素の忠実度を意図的に下げた場合においても精度を維持させることができ、その一方でシミュレーション速度は 9 倍向上しました。
詳細については、リサーチペーパーをダウンロードしてください。
信頼できる単一のシステムレベルモデルの構築
このようなモデルを利用することにより、パワートレイン設計チームは車両の走行距離の拡大を目的とした変更が他の性能と操縦性に悪影響を及ぼさないかを直ちに確認することでき、新たに生じる問題を見落とすことがなくなります。しかしそれだけれはなく、このモデルによってもたらされる精度及びその実施速度はさらに価値を生みます。このようなモデルを使用することで、各部門は周囲のモデルの詳細度にとらわれることなく、自身の業務に重要な部分のダイナミクスを短時間で検討することができます。またその一方で、その結果が他部門の担当領域にどのような影響を与えるかを正確に把握することが可能です。
そしてこれはほんの始まりに過ぎません。このような協働作業が可能なマルチボディモデルは、まったく新しい開発設計の道を開きます。現在私達は次のステップとして、本車両モデル並びに別途用意した最適化ルーチンを使用して、この EV ピックアップの最適な車両パラメータの組合せの探求を行っています。そのうちの一つは、 5 つの指標(走行距離、性能、操縦安定性、ハンドリング性能、乗り心地)にまたがる最適解を求めるものです。
モデロンのライブラリを使用して複雑なマルチドメインやマルチボディモデルを構築する方法の詳細については、お近くの拠点担当者までお問い合わせください。


