Development of New Concept Vehicles Using Modelica and Expectation to Modelica from Automotive Industries
HIRANO, Y.:
SEPTEMBER 3, 2012
9th International Modelica Conference, Munich, Germany
Introduction
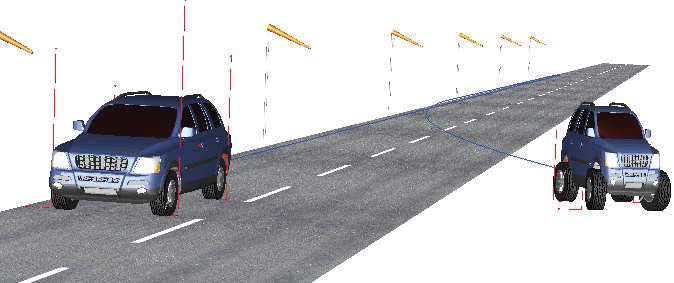
To cope with future mobility society, development of many new concept vehicles is becoming increasingly active in recent years [1]. Those vehicles have characteristics of smaller size, lighter weight, less number of passengers than the conventional vehicles. Also those vehicles tend to be equipped with lower RRC (Rolling Resistance Coefficients) tires and new driving systems mainly using electric motors to achieve less emission and less energy consumption. Some of those future vehicles are equipped with IWM (In-Wheel-Motor) systems to achieve flexible layout of powertrain and also advanced vehicle motion control [2]. Because such new-concept vehicles have different mechanical structure and control structure from those of conventional cars, it was necessary to make new models to estimate their motions by simulation. In this paper, development of the simulation models of those new vehicles by Modelica is described. Those models were developed based on Vehicle Dynamics Library (VDL) of Dymola.